Objectives
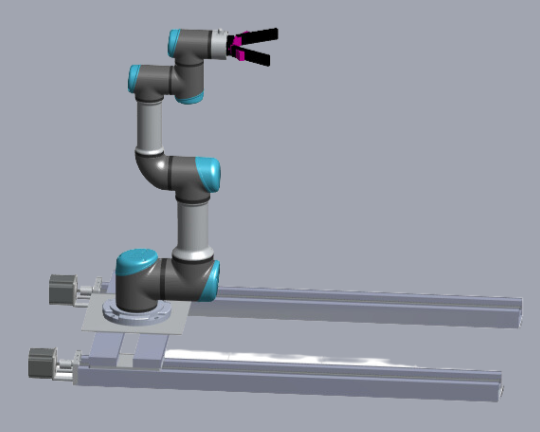
Linear UR3 with custom gripper model

Working volume calculation
Simulation video
You can click to the video to go to youtube, it would be easier to see it more clearly.
Pick and place task simulation on the real UR3
It was not very fancy :) as I need to send separate rossubcriber command to maintain the safety for the robot. However, I did learn how the ROS work in MATLAB and later I can apply it into many other robots in the mechantronics lab.
Conclusion
After this project, I have acquired many invaluable knowledge and skill: